L'écran affiche :

- Ligne supérieure :
- "M" pour Manuel
- "I : xxxx mA" C'est l'intensité consommée par le servo. Mesure de 0 à 1020 mA au pas de 4 mA. Sans mouvement du servo, on lit la consommation de repos.
UTILISATION d'un SERVO-TESTEUR
Le testeur ici présenté permet de MESURER tous les paramètres
essentiels d'un servo, à savoir :
- sa PRECISION
- sa VITESSE
- son COUPLE
- sa CONSOMMATION
Il permet d'apprécier :
- son AMORTISSEMENT
- sa QUALITE de MOUVEMENT
Par ailleurs, géré par un microcontrôleur piloté par quartz, il ne requiert AUCUN étalonnage. ( sauf pour la mesure de l'intensité ) Voir la réalisation .
L'alimentation du testeur se fait sur une entrée identique à celles des récepteurs, norme actuelle GRAUPNER, FUTABA.. THOBOIS .. On y branchera une batterie de 4.8 ou 6 V selon le test envisagé. Une alimentation stabilisé 5V peut être utilisée en atelier. La prise batterie est accessible à droite du testeur alors que le servo se branche à gauche sur une prise au même standard que ci-dessus. Des adaptateurs seront à faire pour des servos à connecteurs différents ( MULTIPLEX par ex. )
Mode MANUEL
Le commutateur de modes à 3 positions est au point milieu.
L'écran affiche :
- Ligne supérieure :
- "M" pour Manuel
- "I : xxxx mA" C'est l'intensité consommée
par le servo. Mesure de 0 à 1020 mA au pas de 4 mA. Sans mouvement du servo, on lit
la consommation de repos.
- Ligne inférieure :
- "POS : xx,x µs" C'est la
valeur de l'impulsion de commande
du servo, à 0.5 µs près et de quelque 800 à 2200 µs. Cette valeur est déterminée
par la position du potentiomètre POS :
( variation rapide ) et celle du vernier TRIM ( variation fine )
La commande VIT et le clavier ( sauf touche "P" ) sont inactifs.
Dans ce mode, le testeur se comporte comme un servo-testeur classique, mais ici avec une grande précision obtenue sans le moindre étalonnage. Bien entendu, la mesure intégrée de l'intensité n'est pas ... très courante !
En mode MANUEL nous pourrons faire :
- le test de fonctionnement simple du servo qui doit évidemment réagir à la
commande POS
- La mesure précise de la valeur de l'impulsion au neutre et celles des fins de
course.
- La mesure des consommations à vide sans déplacement, avec déplacement, puis en
charge.
En mode normal ( I = ) ou en mode HOLD ( I
^ ) qui mémorise et affiche l'intensité de pointe.
La touche P permet de passer d'un mode à l'autre.
- La mesure de la précision .
- Précision mécanique : Installer le servo sur un bâti de
mesure. 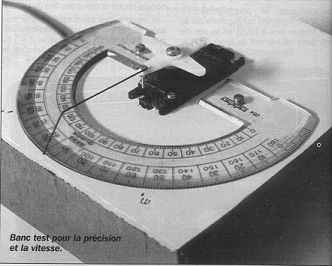
Munir le palonnier d'une flèche en CAP pointant un
rapporteur en degrés.
Amener le servo au neutre par POS. Saisir le palonnier
entre les doigts et le forcer légèrement pour trouver
le jeu qu'il est facile de lire sur le rapporteur.
- Précision électrique : Il s'agit de trouver la variation
minimale de l'impulsion agissant sur le moteur.
Ce test peut se faire en portant le servo à l'oreille pour
déceler le petit crépitement caractéristique de la
correction
de position. Tourner le trim dans un sens jusqu'à entendre le
bruit de correction.
Noter la valeur de l'impulsion. Tourner le trim dans l'autre
sens jusqu'à entendre le bruit de correction inverse .
Noter à nouveau la valeur de l'impulsion. Faire la différence
des deux résultats :
Imp1 - Imp2 = d .
Trouver la précision en % : PE = d /
Imp x 100
Imp étant la valeur choisie pour le test. En général c'est
la valeur au neutre : 1500 µs
Par ex. Imp = 1500 Imp1 = 1507
Imp2 = 1492 soit d = 15
donc PE = 15 /1500 x 100 = 1 %
Rapporté à une course de 90° typique
cela correspond à 90 X 1% soit 0.9 °
Si le jeu est de 1°, la précision
globale est de 0.9 + 1 = 1.9°
Bien entendu on doit faire ces mesures à vide mais aussi en
charge.
- Mesure du couple .
Munir le servo d'un bras en époxy, de 10cm de long, avec des trous espacés de 5 ou 10 mm
permettant ainsi de faire varier le "bras de levier". Le bâti est vertical, le
bras horizontal au neutre. La charge accrochée à d cm du centre de rotation.
 - Couple
de blocage.
- Couple
de blocage.
Sans charge, le servo remonte allègrement le bras de levier. Charger alors jusqu'à ce
que le servo ne parvienne plus à monter le bras. Vous avez alors le couple de blocage :
Bras de levier : d cm charge : M g , soit un poids de M gp et une force développée de M
gf . Couple M x d en gf/cm
Ex: d = 10 cm M = 200 g
Couple de blocage : 10 x 200 = 2000 gf/cm = 2 kgf/cm
N'oubliez pas de noter l'intensité consommée. Elle est souvent très importante. ( max
lisible = 1020 mA )
- Couple réel.
Même dispositif. Au départ, sans charge, noter la consommation de repos. Par ex. 4 mA.
Estimer la consommation tolérable : 8, 12, 16 , 20 mA ... selon vos exigences ou
critères.
Charger le bras jusqu'à obtenir cette consommation lorsque le servo reprend sa position.
Calcul du couple réel comme ci-dessus.
Mode AUTOMATIQUE .
- LINEAIRE. Commutateur de mode vers le haut.
L'écran indique
- Ligne supérieure :
"A" pour automatique, suivi de
"1" pour données n°1
"m et M" qui sont les
données n°1, m est la fin de course mini et M la fin de course maxi.
Ces données m et M sont programmables et
mémorisables. On dispose ainsi de 8 jeux de données m et M .
Voir plus loin.
- Ligne inférieure :
"Lin" pour linéaire
"Tps" pour durée de la course,
affichage en 1/10 s déterminé par la position du réglage VIT. ( de 0 à 5.1 s )
Le servo se déplace linéairement, donc à
vitesse constante du mini au maxi et inversement.
Ce mode permet le test de :
- la qualité du
mouvement. Choisir la vitesse lente ( 5.1 s ) et observer le servo qui doit tourner
sans le
moindre
heurt. On pourra détecter d'éventuels problèmes de piste du potentiomètre, avec un
soubresaut
en passant au
point défectueux.
- l'endurance.
On peut laisser un servo douteux subir ce test pendant le temps nécessaire pour en avoir
le
coeur net, et
cela tout en vaquant à d'autres activités. Différentes vitesses peuvent être
essayées.
- TOUT ou RIEN. Commutateur de mode vers le bas.
L'écran est identique au précédent sauf "T/R" au lieu de "Lin".
Attention les jeux m et M sont communs aux modes T/R et LIN.
Cette fois le servotesteur passe instantanément de m à M, puis de M à m, à un rythme
déterminé par le réglage VIT.
Ce mode permet :
- la mesure de la vitesse :
Reprendre la bâti du mode manuel, avec la flèche de CAP. Choisir la vitesse lente et
pointer sur le bâti l'exacte position de la pointe en m puis M. Vous disposez de 5 s pour
cela.
Augmenter progressivement la vitesse. Constater que, au départ, la flèche retourne bien
à m et M, mais il arrivera un moment où le servo ne parviendra plus à retrouver ces
positions, l'ordre de retour arrivant trop vite. Déterminer la vitesse exacte à partir
de laquelle le servo quitte m et M : C'est la vitesse maxi de ce servo. On fera le test à
vide, puis sous charge.
- l'endurance : Le mode T/R est également utile
pour tester le fonctionnement dans le temps.
Il est tout indiqué pour "nettoyer" un servo un peu encrassé, tant au niveau
des balais du moteur qu'à celui de la piste du potentiomètre.
- l'amortissement : En mode lent, voir si
l'arrêt du servo se fait bien sans oscillations dues à des dépassements succesifs du
point idéal. Modifier éventuellement m et/ou M pour test en divers points de la course.
PROGRAMMATION des données.
Au départ, les 8 jeux de données sont à 1000 et 2000 µs
Pour programmer appuyer sur la touche P : Le curseur clignote sur "A".
L'avancer vers m, puis M avec +, revenir avec -
Plaçons nous par exemple sur "m". Appuyer à nouveau sur P. Le curseur ne
clignote plus. Augmenter la valeur par +, la diminuer par -, en pas à pas, par appui
court, rapidement en maintenant l'appui. La modification de valeur est dynamique : Elle
est répercutée immédiatement sur le signal de sortie.
Appuyer à nouveau sur P pour terminer la modif : Le curseur clignote. Changer ou non "M" de la même manière.
Conclure par appui sur E :
- appui bref : le curseur disparaît. Les valeurs ne sont pas
enregistrées.
- appui long : idem mais les valeurs sont mémorisées en EEPROM
Pour passer d'un jeu de données à l'autre, curseur clignotant sur "A", appui sur P, modif du n°, sortie par P pour afficher le jeu désiré. Faire disparaître le curseur par bref appui sur E.
Terminons ces lignes en souhaitant que ce testeur élaboré retienne votre attention.
Se reporter à la description pour la réalisation.