 Voir Fig. 1.
Voir Fig. 1. Le CODEUR PPM ( 1 )
Dans nos trois premiers articles, nous vous avons parlé des servo-mécanismes : leur
principe, leurs qualités et défauts,
leur test. Le "servo" est le maillon final de la chaîne RC. Il doit être mis
en oeuvre par les maillons antérieurs que nous
vous proposons maintenant d'aborder.
Un servo est affecté à une action particulière, généralement une gouverne : un servo pour les ailerons, un pour la profondeur etc... En radiocommande proportionnelle, à chaque servo correspond une VOIE, celle-ci permettant d'obtenir en théorie, une infinité de positions, pratiquement ... un grand nombre de positions. Notons qu'en Tout ou Rien, chaque commande mobilise un CANAL. Ainsi, pour une gouverne nous utiliserons 2 canaux pour avoir 3 positions seulement, le neutre étant à retour automatique en absence d'ordre. Les systèmes T/R sont ainsi passés du MONOCANAL avec échappement aux MULTICANAUX avec servos électriques. Mais revenons au proportionnel.
Si nous n'avions qu'une voie à transmettre du pilote au modèle, le problème de la RC
serait très simple:
- côté pilote, le générateur d'impulsions de voie, une sorte de servotest muni d'un
manche actionné par ce pilote.
- côté cellule, le servo-mécanisme.
- entre les deux, un moyen de transmission de l'impulsion générée vers le servo.
a) Cela pourrait être un simple FIL conducteur aller/retour.
Voir Fig. 1.
La voiture téléguidée du petit dernier pourrait utiliser ce schéma. Solution très facile à concrétiser : servotest d'un côté, avec sa propre batterie, servo-mécanisme de l'autre, lui aussi avec sa batterie et un double conducteur pour le transport de l'impulsion, car il ne faut pas l'oublier, le courant électrique ne peut circuler que dans un circuit fermé.
b) Cela pourrait être une fibre optique.
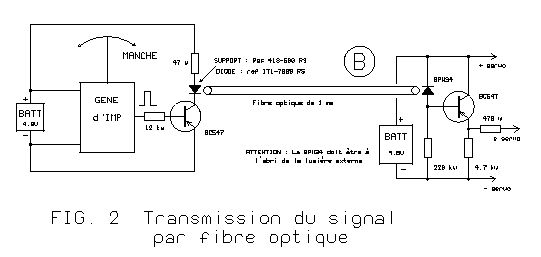 Voir Fig. 2
Voir Fig. 2
. L'information est alors convertie en lumière véhiculée par la fibre. Pas besoin de retour cette fois. L'impulsion du servo-testeur rend le transistor T conducteur et il y a émission de lumière pendant 1 à 2 ms. Cette lumière parvient à la diode réceptrice qui devient conductrice, avec son anode passant à V+, le transistor transmet ce niveau à basse impédance pour l'appliquer au servo-mécanisme.
c) Cela pourrait être une liaison RADIO à Haute Fréquence
(HF).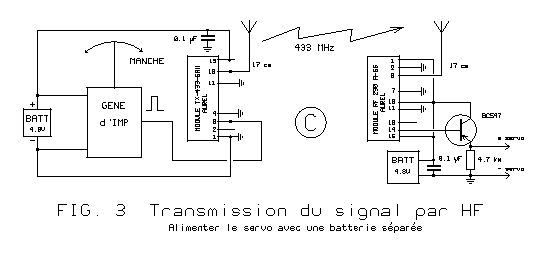 Voir Fig. 3
Voir Fig. 3
. Cette fois la conduction du transistor T par l'impulsion de voie provoque une émission
HF. Celle-ci est captée par un récepteur ad-hoc qui la détecte, l'amplifie et
finalement restitue une copie conforme de l'impulsion initiale. Dans cette figure
l'émission HF dure 1 à 2 ms toutes les 20 ms. Si cette solution a le mérite d'une
consommation minimale, elle présente l'inconvénient de laisser au récepteur, pendant 18
à 19 ms sur 20, la possibilité de capter au mieux les émissions parasites. On préfère
donc la solution contraire : HF pendant 18 à 19 ms et silence radio pendant 1 à 2 ms.
Cela s'obtient très facilement en ajoutant un transistor inverseur T', côté pilote, et
si nécessaire côté servo.
Concluons cet examen en signalant que cette alternance HF/silence a été très utilisée
en RC sous le nom de AM ( Amplitude Modulation ) ce qui tout à fait impropre : Il s'agit
de PM ( Pulse Modulation ). Nous y reviendrons plus tard.
CODAGE PPM.
Les lecteurs ne manqueront pas de remarquer la progressivité des montages A à C, qui nous amènent, avec C, à l'exacte configuration d'un système RC de type "AM", à UNE VOIE ! Les données pratiques accompagnant chaque montage en permettent la réalisation, ce que nous vous conseillons, partant du principe que l'on ne comprend bien qu'en pratiquant, en "touchant" !!
Un système de type C aurait fait le bonheur suprême des amateurs RC des années 1950 ! Pensez donc ! Une commande proportionnelle alors que l'on se contentait d'un échappement !
Mais de nos jours, nous sommes beaucoup plus exigeants : Il nous faut plusieurs voies. Au grand minimum DEUX ( voitures, bateaux, planeurs ... ) et si possible SEPT, HUIT, NEUF ... ! De plus, nous les voulons SIMULTANEES : Il faut pouvoir, à un moment donné, agir sur plusieurs gouvernes en même temps. Or, les montages A à C ne peuvent transmettre qu'une information. Et c'est ici qu'apparaît le problème majeur de la RC : le CODAGE/DECODAGE.
S'il s'agissait du montage A, nous pourrions envisager la structure de la figure
ci-dessous
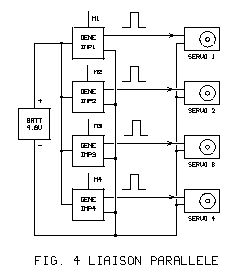 Quatre générateurs
d'impulsions à commandes indépendantes et batterie commune sont reliés à quatre servos
par 4 conducteurs + retour. Cela se ferait très facilement avec la voiture téléguidée
et un câble souple à plusieurs conducteurs. Une telle liaison où chaque signal est
véhiculé sur un conducteur qui lui est propre est dite LIAISON PARALLELE. ( devinez
pourquoi ! ) De telles liaisons sont couramment employées quand la distance à parcourir
n'est pas grande et quand le débit des informations doit être rapide. C'est le cas des
BUS d'ordinateurs qui sont à 8, 16 voire 32 fils. C'est celui du cordon de l'imprimante.
Quatre générateurs
d'impulsions à commandes indépendantes et batterie commune sont reliés à quatre servos
par 4 conducteurs + retour. Cela se ferait très facilement avec la voiture téléguidée
et un câble souple à plusieurs conducteurs. Une telle liaison où chaque signal est
véhiculé sur un conducteur qui lui est propre est dite LIAISON PARALLELE. ( devinez
pourquoi ! ) De telles liaisons sont couramment employées quand la distance à parcourir
n'est pas grande et quand le débit des informations doit être rapide. C'est le cas des
BUS d'ordinateurs qui sont à 8, 16 voire 32 fils. C'est celui du cordon de l'imprimante.
Notons que le schéma pourrait utiliser quatre fibres optiques ou quatre
liaisons HF. Et c'est bien ce qui fut fait à l'époque héroïque de la RC, entre
autres par un certain "De SOTO" : "... De SOTO alla plus loin : Ce furent 4
récepteurs qu'il installa dans un modèle de 4.35 m d'envergure, pesant 13 kilos ...
-- Radio Control of Powered Models, par C.B De SOTO. QST d'octobre 1938.
Evidemment, ce que l'on ne pouvait pas faire autrement en 1938, ne se fera sûrement pas
en 1998. ( Avez-vous remarqué que nos chers frimeurs de 90 n'ont pas inventé le
Petit-Gros !! ) La liaison parallèle ne se fera pas en RC. Que faire alors ? Tout
simplement de la LIAISON SERIE. C'est-à-dire celle de la souris de votre PC, celle du
modem ... Puisque nous ne pouvons pas véhiculer SIMULTANEMENT plusieurs informations sur
plusieurs fils, nous les transmettrons SUCCESSIVEMENT sur un seul fil ! Si nous faisons
cela très vite, l'utilisateur sera berné et croira à la simultanéité !!
Le schéma de la figure ci-contre donne une idée simple pour y parvenir.
Les quatre générateurs d'impulsions supposées DECALEES dans le temps font conduire les
transistors T1 à T4 à charge collecteur commune. Sans impulsion les transistors sont
bloqués et S = V+. Chaque impulsion fait passer S à 0 à son tour. La SEQUENCE ainsi
générée se reproduit toutes les 20 ms, soit 50 fois par seconde.
Notons cependant que dans cette séquence, les temps Tp ménagés entre les temps
utiles t1..t4, ne servent à rien et sont des temps perdus. 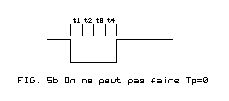
Cependant les supprimer consisterait à "coller" les 4 impulsions pour en faire
une seule ... inutilisable. Fig 5b.
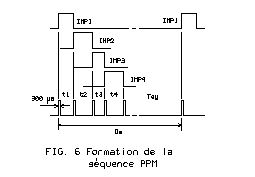
Il fallut on ne sait quel petit génie pour trouver la solution exposée en
Fig. 6. Les quatre impulsions sont CONSECUTIVES ( Tp = 0 ), mais elles ne sont pas
mélangées, mais différenciées. Voir Fig. 6b. Seuls sont conservés les pics positifs
qui marquent le DEBUT de l'impulsion. Ces pics sont alors mélangés et mis en forme pour
donner des impulsions fines ce qui donne la fameuse séquence PPM que nous utilisons
depuis 1966/68 sans la moindre modification !
PPM = Pulse Position Modulation , c'est-à-dire codage par la
position
relative des impulsions dans le temps.
L'astuce était donc de ne pas transmettre les impulsions de voies
mais leurs points de séparation quand on les rend consécutives.
Examinons un peu cette séquence :
- Les impulsions fines durent 300 µs environ, temps choisi
pour une
transmission HF facile et une bonne distinction des temps de
voies.
- Les temps de voies se mesurent d'impulsion à impulsion ( souvent de front
avant à front avant ) : t1, t2 ...
- Le nombre de voies transmises peut être en principe aussi grand que nécessaire,
mais il sera limité par d'autres
contraintes. Voir plus loin.
- La distance entre deux impulsions de même repère ( de "1" à "1"
par ex.) est la durée de séquence Ds
- le temps séparant la dernière impulsion d'une séquence de la première de la suivante
est le temps de synchronisation Tsy.
On a bien sûr : Tsy = Ds - ( t1 + t2 +t3 + t4 + .. )
Ce temps est essentiel car il va permettre au décodeur la reconnaissance sûre de
l'impulsion "1" du début de séquence.
Tsy doit donc être nettement plus grand que la durée maximale d'une voie ( 2 ms )
Il sera souvent de 7 à 8 ms.
Deux solutions sont envisageables et ont été
utilisées :
- Ds constant. Par exemple 20 ms. Dans ce cas le temps
Tsy varie avec la durée des temps de voies et leur nombre.
C'était le cas des codeurs de 1ére génération . Voir plus loin. Le décodeur
doit toujours pouvoir trouver "Tsy" malgré
cette variation.
Ex : Ds = 20 ms T1=T2=T3=T4= 1 ms donnent Tsy = 16 ms
T1=T2=T3=T4= 2 ms donnent Tsy = 12 ms
Avec 8 voies à 2 ms, on aurait Tsy = 4 ms !!
- Tsy constant. Par exemple 8 ms. Cette fois le
décodeur n'a pas de problème car c'est Ds qui varie en fonction des
temps de voies et de leur nombre. ( Codeurs de 2ème .... génération )
Ex. En prenant des cas limites :
Tsy = 8 ms T1 ... T4 = 1 ms donnent Ds = 12 ms
T1 ... T8 = 2 ms donnent Ds = 24 ms
Dans les conditions de ces exemples, les servos recevront une information de position
toutes les 12 ou 24 ms. Ce n'est pas sans importance :
- Sur la puissance des servos : En effet c'est l'impulsion de voie qui fixe la
position du servo, chacune imposant sa correction. Plus ces impulsions sont distantes et
plus on laisse de liberté au servo. Conséquence, moins il y a d'impulsions par seconde
et plus le servo perd précision et puissance sous la charge. Ceci permet de comprendre
pourquoi il n'est pas possible d'augmenter à loisir le nombre de voies transmises. On
pourra aller jusque huit ou dix au grand maximum !
- Sur le comportement de certains variateurs. Quelques modélistes pratiquant
l'indoor ont peut-être eu la surprise de constater que le moteur changeait de régime en
actionnant une commande quelconque. C'est parce que le variateur bas
de gamme utilisé est sensible, non seulement au temps de sa voie, ce qui est normal, mais
aussi à Ds, ce qui ne l'est pas.
Or Ds varie avec la durée de chacune des voies, nous venons de le voir.
PRATIQUE du CODEUR PPM.
Les codeurs PPM de nos émetteurs ont connu plusieurs évolutions dans le temps :
Codeurs de 1ère génération. ( .. 1970 .. )
Ils étaient bien entendu à transistors, les circuits intégrés n'existant pas ! Nous
vous proposons en Fig. 7 un schéma extrait de "MODELE AIRPLANE NEWS" de
Sept.1968 p.47.

Les transistors T1 et T2 constituent un oscillateur de fréquence égale à celle des
séquences ( 50 Hz ) Suivent les transistors T3, T4 .. tous montés en univibrateurs
élémentaires, chacun déclenché par l'étage précédent et générant une impulsion de
voie dont la largeur varie avec le potentiomètre de 5 kW de
collecteur de l'étage précédent,
dans une fourchette ajustée par la résistance variable de base ( course ).
Tous les créneaux de voies sont différentiés ( Fig 6b ) par une cellule RC (47 kW/4.7nF) donnant des pics positifs sur
les fronts montants et négatifs sur les descendants. Les diodes D1 .. D5 ne laissent
passer que les négatifs qui bloquent
Q7 pendant 300 µs environ. Q8 inverse le signal et délivre la séquence PPM. Notons la
valeur de 1.7 ms souvent retenue
à cette époque pour le neutre. La durée de séquence Ds, imposée par la fréquence de
l'horloge Q1/Q2 est constante,
c'est donc le temps de synchro Tsy qui varie .
Ces codeurs très rustiques, très simples fonctionnaient fort bien, mais ils avaient
quelques défauts :
- interréaction entre le réglage de course et le calage du neutre£
- pas moyen d'inverser le sens d'action des manches
- impossibilité de réaliser les fonctions de dual-rate, exponentiel, couplages
et autres mixages.
Il faut dire que ces défauts n'indisposaient pas du tout les modélistes du moment, qui sortant des multicanaux Tout ou Rien étaient tout simplement émerveillés par les possibilités de leur dernier joujou !
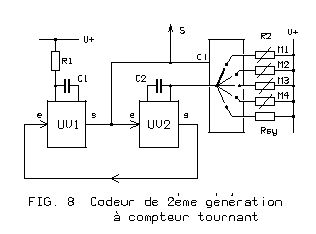
Codeurs de 2ème génération.
 Introduction des
circuits intégrés CMOS à faible consommation.
Introduction des
circuits intégrés CMOS à faible consommation.
ls amènent une grande simplification du codeur. La Fig. 8 en donne un exemple. On trouve
deux univibrateurs se déclenchant récipro- quement : UV1 déclenche UV2 qui lui rend la
pareille. UV1 génère les impulsions de 300 µs, donc la séquence, par la constante de
temps R1/C1. UV2 génère les temps de voies et Tsy par R2/C2.
La résistance R2 d'une voie est choisie par un commutateur tournant CMOS, qui avance d'un
pas à chaque impulsion UV1. Ainsi on utilise d'abord M1, puis M2, puis M3 ... enfin la
résistance Rsy donnant Tsy ... et on recommence ! Outre le faible nombre de composants
requis, le codeur ainsi réalisé fonctionne à Tsy constant, ce qui est mieux ... pour le
décodeur. Toutefois les mêmes autres défauts subsistent et ne trouveront remède
qu'avec les codeurs de
3ème génération