Le CODEUR PPM ( 2 )
CODEURS de 3ème génération.
( 1980 )
Un grand pas en avant avec l'introduction dans les codeurs d'un composant nouveau :
L'amplificateur opérationnel dont nous allons d'abord dire un mot.
L'ampli OP est un circuit intégré qui, comme son nom l'indique, amplifie une tension. En
fait, il comporte deux entrées différentielles e+ et e- et une sortie s. La tension de
sortie est fonction de la DIFFERENCE des tensions des entrées :
Si e+ > e-, la tension en s monte, elle descend dans le cas contraire. 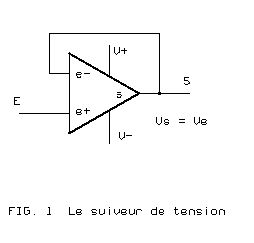 Si e+ = e- la tension s ne
change plus.
Si e+ = e- la tension s ne
change plus.
Inversement on peut admettre que lors d'un état STABLE, on a toujours e+ = e- . C'est ce
qu'il faut bien se mettre dans la tête si on veut comprendre ces petites
bêtes !
Montage suiveur de tension. Fig. 1.
L'entrée e- est directement reliée à la sortie. Partant du principe ci-dessus, à
l'état stable on a e+ = e- = s . Dans ces conditions, toute variation de e+ entraîne
celle de s, d'où le nom du montage. Avantage: Les entrées sont à impédance élevée,
mais la sortie est à impédance basse. Il y a donc amplification de PUISSANCE mais pas de
tension.
Montage en ampli inverseur. Fig. 2.
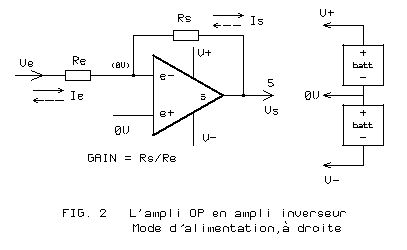
L'entrée e+ est au potentiel 0V, milieu de l'alimentation V+/V-. Une tension Ve est
appliquée à travers Re sur e-, reliée par Rs à s.
A l'état stable e- = e+ = 0V. Il s'établit un courant Ie dans Re. On a Ie = ( Ve - 0V )
/ Re = Ve / Re ( car 0V = 0 ! ) Ce courant ne peut pas aller dans e-, à trop forte
impédance, il doit alors passer dans Rs et y développe
une tension Vs = Rs x Ve / Re ou Vs = Ve x Rs / Re ce qui montre que le GAIN en tension
est donné par le RAPPORT des deux résistances Rs et Re.
Ainsi, si Rs = 10 kê et Re = 2.5 kê , le gain sera de 4.
Notons que ce gain ne dépend QUE des deux résistances et qu'il est largement
indépendant du type d'ampli OP et de ses tensions d'alimentation. Le montage est
inverseur car lorsque Ve monte, Vs descend.
Mais revenons à nos codeurs. Voir Fig. 3. 
La tension de manche Mx est "lue" à travers un commutateur tournant, par un
ampli OP inverseur. On retrouve ainsi cette tension de manche amplifiée en s de l'ampli
OP. Cette tension est appliquée à l'entrée E d'un générateur d'impulsions de 300 µs,
dont la récurrence est déterminée par R1/C1 d'une part et par la tension en E d'autre
part. Le générateur est calé par R1 de manière à donner le NEUTRE lorsque E = 0V.
Le manche connecté entre V+ et V- délivre au point milieu de sa course le 0V qui
donne 0V en s et donc le NEUTRE. Tout déplacement du manche dans un sens ou l'autre
décale la tension s et provoque la variation du temps de voie. L'amplitude de la
variation est déterminée par le gain de l'ampli OP. La résistance Re est pour cela
ajustable : Elle permet le réglage de la COURSE de voie qui est parfaitement
indépendante du calage de neutre.
C'est le premier avantage des codeurs à ampli OP.
Second avantage : Si
le manche est bien calé au milieu de sa course pour le neutre, il suffit de permuter V+
et V-
sur ses extrémités pour inverser le SENS d'action, sans modifier le neutre ce qui était
impossible avec les codeurs précédents.
Par ailleurs,
avec ces derniers, l'information de voie n'existe qu'à l'instant de sa création : Etages
actifs successivement dans les codeurs de 1ère génération ou résistances de manches
sélectionnées les unes après les autres pour la 2ème génération.
Par contre, cette fois, l'information de VOIE est une tension CONTINUE disponible en
PERMANENCE sur le curseur de chaque potentiomètre de manche. Des effets secondaires
variés sont alors possibles :
COUPLAGES. Voir Fig. 4. 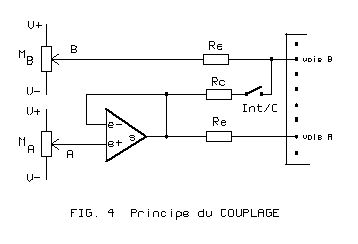
La voie A est déterminée par le manche Ma.
La voie B est liée à celle du manche Mb.
Si l'interrupteur Int est ouvert, les deux voies sont indépendantes.
Si l'inter Int est fermé, la tension du manche Ma est injectée
dans la voie B par Rc. Dans ces conditions, la voie B dépend à
la fois des manches Ma et Mb. Inversement la voie A n'est pas
influencée par le manche Mb car le point S, sortie du suiveur de
tension, est à basse impédance et court-circuite les retours
éventuels de courant en provenance de ce manche.
La résistance Rc permet d'ajuster le TAUX de couplage.
La voie B est dite COUPLEE à la voie A.
Nous pourrons dire que la voie A est VOIE MAITRE et que
la B est VOIE ESCLAVE : A agit sur B, mais B n'agit pas sur A.
Si nous voulons à priori que toute voie puisse être maître, il faut prévoir un
suiveur de tension sur chaque sortie de manche.
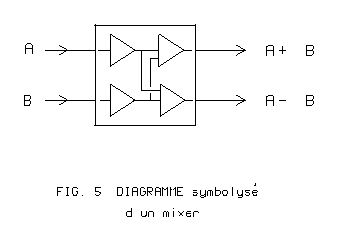
MIXAGES. Voir Fig. 5.
 Le mixage est par
principe un couplage réciproque: A agit sur B et B agit sur A. On pourrait donc imaginer
de symétriser le montage de la Fig. 4. Toutefois les mixages requis pour les avions sont
souvent spécifiques : Ce sont les mixages ailerons/profondeur sur les ailes volantes ou
profondeur/dérive pour les empennages papillons. Dans ces cas, un manche doit actionner
les deux voies mixées dans le même sens ( profondeur ) tandis que l'autre doit les
actionner en sens contraire ( ailerons ou dérive ). Il est alors préférable de
réaliser un mixeur spécialisé. Fig. 5.
Le mixage est par
principe un couplage réciproque: A agit sur B et B agit sur A. On pourrait donc imaginer
de symétriser le montage de la Fig. 4. Toutefois les mixages requis pour les avions sont
souvent spécifiques : Ce sont les mixages ailerons/profondeur sur les ailes volantes ou
profondeur/dérive pour les empennages papillons. Dans ces cas, un manche doit actionner
les deux voies mixées dans le même sens ( profondeur ) tandis que l'autre doit les
actionner en sens contraire ( ailerons ou dérive ). Il est alors préférable de
réaliser un mixeur spécialisé. Fig. 5.
Un tel mixeur à base d'amplis OP délivre sur sa sorties des informations de même
sens pour A et de sens contraire pour B.
Des réglages permettent d'ajuster les taux de transfert à et á.
Notons que ces taux doivent être voisins de 0.5 car les effets des deux manches
s'additionnent et donnent des courses excessives si on n'y prend pas garde.
DUAL-RATE. Voir Fig. 6.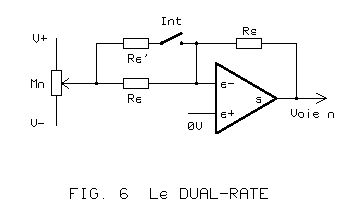
C'est beaucoup plus simple car il s'agit seulement d'avoir deux réglages de course pour
une gouverne : Une course normale donnant le plein débattement et una autre réduite pour
une moindre efficacité de la gouverne. On peut ainsi passer d'un mode de pilotage
"sportif" à un autre beaucoup plus calme !
Il suffit de modifier la résistance Re de la voie concernée : Une grande valeur pour
réduire la course, une moindre pour le débattement normal. C'est l'inter Int de la Fig.
6 qui assure cette fonction.
EXPONENTIEL.
Tous ceux qui ont fait voler un avion savent que "bricoler" des interrupteurs en
vol est difficile, voire dangereux ! D'où cette
idée de combiner les deux modes en un, sachant que la course réduite s'utilise surtout
au voisinage du neutre.
 |
 |
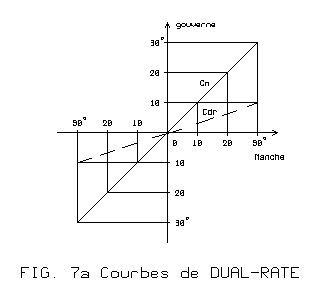
La Fig. 7a montre le mode DUAL-RATE classique. On
peut ainsi passer d'une course normale à une course réduite à 1/3 dans cet exemple.
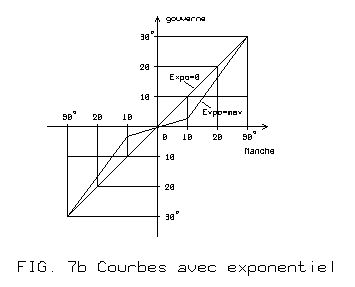
La Fig. 7b montre la réaction en mode exponentiel :
Au voisinage du neutre vous disposez de la course réduite, mais au-delà vous retrouvez
la course normale, sans aucune commutation, bien sûr !
La forme de la courbe en S obtenue peut se modifier en allant du tout linéaire ( Expo = 0
) à l'inflexion maximum.
L'exponentiel permet de fignoler les trajectoires tendues sans perdre les qualités
acrobatiques du modèle. Nous estimons que l'introduction des courbes en S a été une des
évolutions les plus importantes sur le plan pilotage. Un avantage secondaire de
l'exponentiel est de minimiser la réaction d'une voie sur la voie associée du même
manche. Sans "expo" il est souvent très difficile de ne pas déplacer, par
exemple, la dérive en déplaçant la profondeur, ou inversement.
Electroniquement les voies en S s'obtiennent en intercalant un ampli non linéaire entre
manche et Re. La courbe en coude caractéristique des diodes est souvent utilisée pour
obtenir cet effet.
CODEURS de 4ème génération.
( Réf. 3 )
Les codeurs à amplis OP ont fait faire à nos émetteurs un grand pas en avant en nous
apportant :
- indépendance neutre/course
- inversion des sens d'action
- dual-rate et surtout courbes en S
- couplages et mixages
.... mais ils ont un inconvénient : Tout cela s'obtient à grands renforts d'amplis OP et
si l'on veut TOUT,
la structure matérielle du codeur s'alourdit fortement.
Par ailleurs, une fois le résultat obtenu, celui-ci n'est valable que pour UNE SEULE
CELLULE ! Pour en changer, il faut modifier les connexions internes, les réglages ... Il
y a de quoi hésiter !! On ne doit donc pas s'étonner que les concepteurs se soient
creusé les méninges pour faire mieux ! Heureusement pour eux, l'électronique va leur
apporter l'arme absolue : Le MICROPROCESSEUR !! Celui-ci va permettre de TOUT FAIRE,
presque sans matériel ( Le HARD ! ) celui-ci étant remplacé par du logiciel ( Le SOFT !
) L'utilisateur se contentera de pianoter sur quelques touches pour faire les réglages de
sa cellule, puis pour les mémoriser. Il pourra faire cela pour un nombre souvent
important de modèles différents !
Bien entendu, nous ne ferons pas dans ces pages, un cours sur les µP : Le sujet est
beaucoup trop vaste.
En fait, le µP initial est presque toujours remplacé par un MICRO-CONTROLEUR ( µC ),
c'est-à-dire un circuit intégré qui contient non seulement le µP, mais quelques blocs
logiques qui en simplifient diablement l'utilisation.
La Fig. 8 montre, à titre d'exemple, la structure interne du
68HC11 de MOTOROLA. ( Mais ils se ressemblent tous ! )
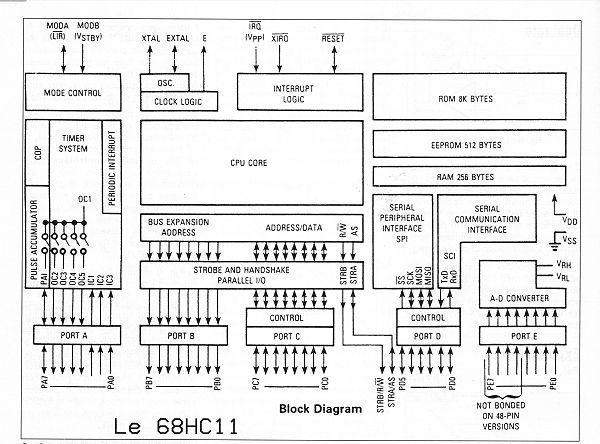
Le µP proprement dit correspond à la partie centrale de la figure : CPU
Core, Interrupt Logic, Osc et le bus des adresses
et data. Mais nous disposons en plus d'un Timer puissant, de mémoires ROM, EEPROM et RAM,
d'un convertisseur Analogique/Digital à 8 entrées, de circuits de communication SERIE
avec l'extérieur, le SPI et le SCI.
Enfin les ports d'entrées et/ou sorties PA, PB, PC, PD et PE. 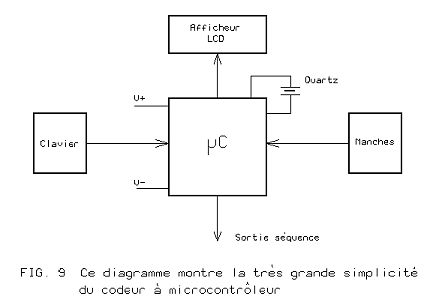
Cette bête de course pourra être le coeur du codeur
performant de la Fig. 9. Le port E lit les positions
des manches et commandes, le port B gère l'afficheur LCD, le port C, le clavier et autres
interrupteurs, le port A sort la séquence et gère quelques annexes, le port D communique
avec des périphériques locaux
( SPI ) ou extérieurs ( SCI )
Il faut très peu de composants externes, ce qui donne au système une très grande
fiabilité. Le programme de fonctionnement est écrit dans la mémoire ROM, les données
programmables par l'utilisateur seront en EEPROM tandis que la RAM sera le
"brouillon" du µC qui y écrit des données temporaires.
Les possibilités sont généralement impressionnantes et la plupart des utilisateurs n'en
exploitent qu'une partie. Par ailleurs, tous les temps générés par le codeur sont
fabriqués par le TIMER dont l'horloge est un quartz. La stabilité dans le temps et à la
température est donc parfaite, ce qui n'était pas tout à fait le cas des codeurs
précédents.
Un tel codeur entièrement logique ne requiert pas de mise au point. Son fonctionnement
est assuré sans réglages. Il est donc plus facilement réalisable par l'amateur que les
codeurs analogiques précédents dont la finalisation était parfois "pointue".
En contre-partie, et c'est le cas pour tous les systèmes à µP, le réalisateur
"lambda" passe à côté de la partie la plus intéressante du montage, à
savoir le programme logiciel, ce qui peut s'avérer un peu traumatisant. C'est bien
dommage mais hélas inévitable
Il est assez évident que le codeur à µP sera difficilement remplaçable par
"mieux" dans les années à venir. Comme il est possible de broder à l'infini
sur le thème, on y restera sans doute longtemps .... à moins que l'électronique de
demain ne nous réserve une autre révolution en nous proposant un composant miracle
auquel nous ne pensons même pas !!