VARIATEUR pour
ELECTRIQUE
Le VAR11-v4
I. PRESENTATION
RAPIDE.
Caractéristiques essentielles :
- Possibilité en courant de 150 ampères max THEORIQUES
- Résistance de passage pouvant descendre à 5
mW
- Découpage du courant moteur à 2000 Hz
- Frein moteur possible à l'arrêt
- Système BEC prévu
- Batterie moteur de 7 à 28 éléments
- Gestion par microcontrôleur permettant
. Une réalisation
TRES SIMPLE
. Absence totale de mise
au point
. Processus de
sécurité au
démarrage, interdisant toute
mise
en marche inopinée du moteur,
avec les dangers qu'elle
présente.
. Programmation par
l'utilisateur des points de fonctionnement : point d'arrêt, point de
régime maxi ...
. Programmation de la tension
de la batterie effectivement utilisée
. Surveillance permanente
de cette tension batterie avec coupure automatique du moteur lorsque le seuil
programmé
est atteint.
- Prix de revient modéré et modulable par le choix et le nombre
des MOSFET utilisés .
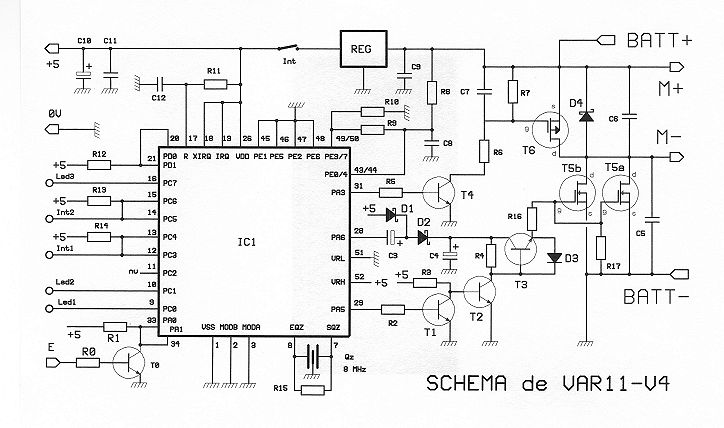
II. ETUDE du SCHEMA. Voir Fig. 1
 .
.
1. Observons d'abord la partie puissance : Le moteur relié
au +BATT retourne au -BATT à travers les transistors
MOSFET T5, servant d'interrupteurs. Parmi les nombreux types possibles ..
et disponibles ( Voir tableau 1 ) le meilleur
passe 75 ampères ! Si vous en montez deux, cela donne 150 A ! Excusez-nous
du peu ! Ce modèle a une résistance de passage RDSon de 9 m
typique. Avec deux, vous tombez à 5 mW
!
Pour un moteur consommant 50 A ( ce n'est pas rien ! ) la chute de tension
due aux MOSFET est de 50 x 0.005 = 0,25 V ...
Dérisoire !
La diode D4, dite "de roue libre" protège les MOSFET des surtensions
engendrées par le collecteur du moteur et elle régularise le
fonctionnement. C5 et C6 réduisent les parasites.
Les transistors T5 sont de "canal N". Ils ont le "drain" côté
+ et la "source" côté -. Ils deviennent conducteurs quand le
"gate" est porté à une tension supérieure à +4.5V.
On notera d'ailleurs que la conduction d'un MOSFET n'est pas linéaire
:
Sous 4.5V, il est bloqué et il devient rapidement conducteur au-dessus
de cette tension. Pour une résistance de passage
faible, il faut porter le "gate" à +7V au moins. Les
caractéristiques constructeur sont souvent données pour Vgs
= +10V.
Le maximum absolu est de +20V. Ajoutons à cela, que si la consommation
"gate" est nulle en statique, elle ne l'est plus en dynamique ( découpage),
à cause de la capacité gate-source importante ( 2 à
3000 pF ) qu'il faut charger et décharger.
Ces considérations nous amènent au circuit retenu pour la commande des "gates":
- Un doubleur de tension D1,D2,C3,C4, alimenté par un créneau
rectangulaire à 2000 Hz fabriqué par IC1, en sortie PA6,
élève la tension de +5V issue du régulateur REG2, à
presque +10V, ce qui, dans tous les cas, et jusqu'à la décharge
complète mais contrôlée de la batterie nous garantit
une conduction optimum des MOSFET.
- La commande de puissance est générée sur la sortie
PA5 de IC1. Si PA5 = +5V, T1 conduit, bloque T2 qui fait conduire T3. Le
+10V issu du doubleur est appliqué sur les gates, à travers
R16, permettant un temps d'établissement contrôlé
malgré
la capacité Cgs importante. Lorsque PA5 = 0, T2 conduit et met les
gates à la masse à travers D3, ce qui les bloque
énergiquement. Ce système de commande des MOSFET permet d'avoir
un créneau bien rectangulaire sur les gates avec un blocage total
ou une excellente conduction. Ce ne serait pas le cas si la tension de
déblocage était insuffisante ou si des temps de basculement
trop longs mettaient les MOSFET en régime de conduction moyenne pendant
une notable partie du cycle de découpage : Dans un tel cas les MOSFET
chauffent anormalement.
- La tension minimale de la batterie est déterminée par le
régulateur BEC. C'est un modèle LO-DROP.
Pour une sortie restant à +5V, on peut estimer nécessaire +5.4V
à l'entrée de ces régulateurs. Si l'on admet que la
tension d'une batterie déchargée est les 2/3 de sa tension
de fin de charge, ( soit 1.4 x 2/3 = 0.93V par élément de 1.2V
) on arrive
à 5.4 x 3/2 = 8.1 V. Dans ces conditions, la batterie minimale aurait
7 éléments. ( 8.4V ) La tension maximale de batteries
est simplement limitée par la tension de claquage des MOSFET : 50
à 60V selon les modèles.
- Pour en terminer avec la section puissance, remarquons le MOSFET T6, de
canal P ( drain au - et source au + ).
Lorsque PA3 de IC1 est à 0, T4 est bloqué ainsi que T6. Lorsque
PA3 = +5V, T4 conduit et porte le gate de T6 à -BATT, ce qui le fait
conduire. Le moteur est court-circuité, donc freiné. Bien entendu,
le logiciel interdit la conduction simultanée des T5 et de T6 !
2. La section MICROCONTROLEUR , avec IC1, est "apparemment" beaucoup plus simple. IC1 est un MC68HC11A1FN de MOTOROLA. Il fonctionne ici en mode BOOTSTRAP ( ModA = ModB = 0 ) sur un programme interne contenu dans la mémoire EEPROM. La capacité de celle-ci n'étant que de 512 octets, il nous a fallu faire beaucoup d'efforts pour loger toutes les routines nécessaires. Nous y sommes parvenu, avec 5 ou 6 octets restants !! Le quartz d'horloge est à 8 MHz.
- L'entrée de l'impulsion de commande issue d'une voie du récepteur
se fait, à travers T0 sur PA1 qui détecte le front
montant et PA0 pour le front descendant. Seules sont acceptées les
impulsions POSITIVES, ce qui est le cas de tous les systèmes actuels.
Le transistor T0 a été ajouté pour permettre
le bon fonctionnement avec certains récepteurs commerciaux dont les
signaux de voies ont une amplitude inférieure à 4Vcc. Par ailleurs,
l'arrêt est obtenu avec une impulsion courte ( 1 ms typ.)
et le plein gaz avec une impulsion longue ( 2 ms typ.) Ces paramètres
d'entrée ne sont pas modifiables. Par contre, les points de fonctionnement
sont programmables. Voir Fig. 2.
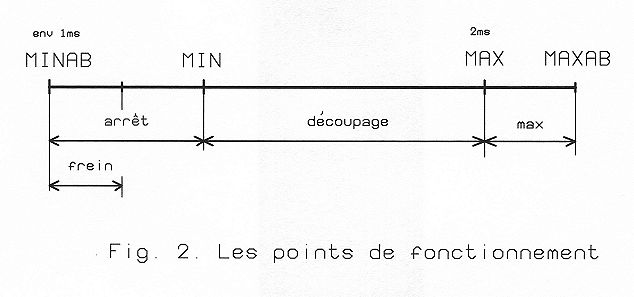
. Le MINIMUM ABSOLU, ( MINAB ) correspondant à
la butée basse du manche, côté arrêt.
. Le MINIMUM, ( MIN ) terminant la zone d'arrêt
et amorçant celle du découpage accélérant de
plus en
plus le moteur jusqu'au régime
maxi.
. Le MAXIMUM ( MAX ) point au-delà duquel le
découpage est supprimé pour être remplacé par
une conduction
permanente des MOSFET.
L'utilisateur peut placer ces 3 points, dans l'ordre de la figure 2, où IL LE VEUT.
Le frein n'agit qu'entre MINAB et le point central de la zone d'arrêt
allant de MINAB à MIN.
Cela permet un contrôle de l'action frein par le pilote. Si le variateur
est utilisé sur une voiture électrique, on peut ainsi
donner des coups de frein contrôlés.
La maximum absolu ( MAXAB ) n'est pas programmable, mais fixé par
logiciel à 2.5 ms. Si l'impulsion d'entrée dépasse cette
valeur, le soft considère qu'il y a défaut et stoppe le moteur.
- Le 68HC11 contient un convertisseur A/D à 8 entrées ( PE0
à PE7 ). Il est donc possible de mesurer la tension batterie
en permanence. Le maximum mesurable est la valeur de la référence
haute ( VRH ) donc +5V. Pour pouvoir mesurer jusque 40V, un pont diviseur
est réalisé avec R8, R9 et R10. Ce pont réduit la tension
batterie à 12.5% ( 40V -> 5V , 8.4V -> 1.05V ) et l'applique
sur les entrées PE0 et PE4 pour mesure. Le résultat est
comparé avec un seuil limite mémorisé au
moment de la programmation des paramètres. En effet, les résistances
R9 et R10 appliquent 13/13+8.2 soit 62% de la valeur précédente
sur les entrées PE3 et PE7. A condition de faire la programmation
avec une batterie sortant de charge, la valeur limite de décharge
sera automatiquement enregistrée, quel que soit le nombre
d'éléments utilisés.
- Le port PC ( lignes PC0 à PC7) est utilisé pour le dialogue
avec l'utilisateur en phase de programmation.
Les poussoirs Int1 et Int2 d'un module de programmation extérieur
exécutent les actions et les témoins Led1 à Led3
concrétisent ces exécutions.
- Le 68HC11 est en permanence sous contrôle de son ATCHDOG interne
: Si l'impulsion d'entrée disparaît pendant 1 seconde, il y
a reset général avec rechargement de toutes les
données.
- L'alimentation en mode BEC ( Battery Eliminator Circuit ) est assuré
par le régulateur REG, un LM2940 de type LO-DROP.
- MODE SECURITE. Un moteur électrique n'a pas à être
lancé pour démarrer comme un thermique : Il démarre
seul et de ce fait, présente un danger pour l'utilisateur et ses proches
voisins.
Nous avons donc inclus dans le logiciel une routine imposant un processus
précis de démarrage. Quelles que soient les conditions de mise
en marche du système, le démarrage du moteur exige une mise
du manche sur MINAB, pendant 2 à 3 secondes.
Ce délai écoulé, le moteur démarre alors en partant
de MINAB, donc au ralenti d'abord.
Une rupture de liaison de plus de 1 seconde met le moteur à l'arrêt
et oblige
à une réédition du processus.
Si la coupure moteur est provoqué par batterie déchargée,
il ne peut y avoir remise en route spontanée par récupération
de la batterie. Toutefois, en cas de nécessité, on peut retrouver
quelques secondes de moteur en rééditant le processus ci-dessus,
cela autant de fois que la batterie y consentira ! Il faudra donc acquérir
le réflexe de toujours ramener le manche "gaz" à MINAB, tout
d'abord pour bénéficier du frein, si nécessaire, et
surtout pour réactiver le variateur et pouvoir récupérer
quelques secondes moteur en cas d'urgence
III. REALISATION
Le variateur décrit est d'une réalisation très simple,
par le nombre réduit des composants utilisés et surtout par
l'absence totale de mise au point.Pour parvenir aux dimensions réduites
escomptées, tous les composants, sauf Mosfets et régulateur
sont de type CMS
1. Liste des composants
| T5a, T5b MOSFET de canal N. TO220.
Voir tableau 1 T6 MOSFET de canal P. TO220. Voir tableau 2 T0/1/2/3/4 BC549B en CMS D1/2 BAV99 D3 BAV70 D4 Diode RAPIDE TO220. Par exemple BYT08PI-200 REG1 LM2940 TO220 si BEC IC1 MC68HC11A1FN programmé par l'auteur |
R0 10
kW
CMS 805 R1 10 kW CMS 805 R2 10 kW CMS 805 R3 18 kW CMS 805 R4 18 kW CMS 805 R5 10 kW CMS 805 R6 5.6 kW CMS 805 R7 150 kW CMS 805 R8 150 kW CMS 805 R9 8.2 kW CMS 805 R10 13 kW CMS 805 R11 47 kW CMS 805 R12 22 kW CMS 805 R13 22 kW CMS 805 R14 22 kW CMS 805 R15 10 MW CMS 805 R16 470 W CMS 805 R17 22 kW CMS 1206 |
C0 1 nF
CMS 805 C1/C2 supprimés C3 4.7 µF CMS tant/10V C4 4.7 µF CMS tant/16V C5 0.1 µF CMS 1206 C6 0.1 µF CMS 1206 C7 0.1 µF CMS 1206 C9 0.1 µF CMS 1206 C8 0.1 µF CMS 1206 C10 10 µF CMS tant/16V C11 0.1 µF CMS 1206 C12 0.1 µF CMS 1206 |
1 Circuit imprimé 1 quartz 8 MHz CMS ( RS : 301:5471 ) 1 support PLCC 52 br ( RS : 160-5381 ) 1 conn. femelle MINICOM 7 pts. ( RS : 230-4938 ) 1 jeu de fils |
NB. Contacter l'auteur pour tout problème d'appro.
2. CIRCUIT IMPRIME.
A faire en époxy double face de 16/10.
Films dispos auprès de l'auteur. Fichiers PostScript sur son site
Web.
Etamage des circuits. Perçage à 6/10 des trous de renvoi
recto/verso, 8/10 pour le connecteur 2.54, 10/10 pour les TO220.
En cas de demandes assez nombreuses ( > 25 ) des circuits à
trous métallisés pourront être commandés.
3. POSE DES COMPOSANTS.

Utiliser obligatoirement un fer à
souder fin (1 mm maxi) et de la soudure 5/10.
Comme vous n'aurez probablement pas de circuits à trous métal,
sauf demande massive auprès de l'auteur, il faudra vous livrer à
la tâche assez fastidieuse consistant à réaliser les
renvois recto-verso en fil fin.
Cela effectué et bien vérifié, procéder à
la pose de tous les composants R et C CMS du recto, puis à ceux du
verso en y ajoutant transistors, diodes et quartz. Ce dernier fixé
par 3 pts : 2 en bas vers R15 et un de masse en haut. Notons que ce quartz
contient en plus les deux habituels condensateurs de retour à la masse
( C2 et C3 )
Passer à la pose du support PLCC, dans le bon sens. Pour cela, il
faut d'abord en supprimer le fond : un petit appui suffit pour cela.
Bien positionner le support sur les pistes. Souder 2 picots en diagonale
( technique du grain de soudure, voir CONSEILS )
Puis souder normalement tous les autres picots.
Souder le connecteur femelle 7 points servant à la programmation des
paramètres.
Terminer le travail en mettant en place les Mosfets, diode et régulateur
en boîtier TO22O
Souder les fils de liaison, batterie et moteur et ceux allant vers le
Rx.
Dans le cas de l'alimentation en BEC ( avec le régulateur installé
et alimentation du récepteur par le variateur ) vous pourrez prévoir
un interrupteur : Pour cela, couper la piste située entre le
régulateur et C10 et rétablir la continuité par cet
interrupteur.
Mais vous pouvez aussi fonctionner sans BEC : Ne pas installer le
régulateur et alimentez le récepteur normalement avec une batterie
distincte ayant son propre interrupteur. Le µC du variateur est alors
alimenté par le récepteur.
4. MISE EN SERVICE.
Ne pas monter le 68HC11. Remplacer le moteur par une ampoule convenable (
1A environ ) Intercaler un fusible 2A dans l'alimentation et brancher sur
la batterie. L'ampoule est éteinte. Vérifier que le +5V arrive
bien sur tous les points ad hoc. Trouver une tension inférieure sur
les picots 43/44, plus faible encore sur 49/50. Se servir du schéma
pour cette vérification.
Si tout est correct, débrancher et placer le 68HC11. Remettre sous
tension. L'intensité passe à 8 mA. Si vous avez un oscilloscope,
vérifier l'existence du créneau rectangulaire sur PA6, sinon
se contenter de vérifier le +10V à la sortie de D2.
Si c'est bon, en principe, le reste aussi.
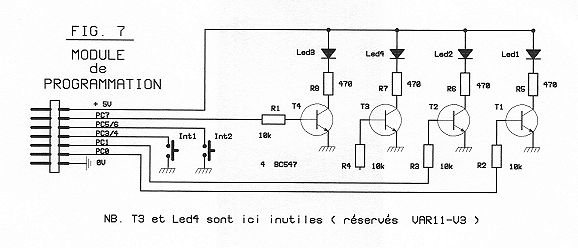
5. MODULE de PROGRAMMATION.
Ce module permet de programmer la position exacte des points de fonctionnement, programmation à ne pas confondre avec celle du 68HC11 qui doit être effectuée par l'auteur, en principe !
 Réaliser
le module de programmation de la
Réaliser
le module de programmation de la
Fig. 7 et 8
Rappelons que l'émetteur doit fournir une impulsion de 1 ms env.
côté arrêt et 2 ms env, côté plein gaz.
Mettre l'ensemble de RECEPTION sous tension, variateur avec son ampoule.
Emetteur sur arrêt.
ATTENTION --> Pour passer en mode PROGRAMMATION, il faut appuyer sur INT2,
AVANT et PENDANT la mise sous tension du variateur. La LED3
s'allume.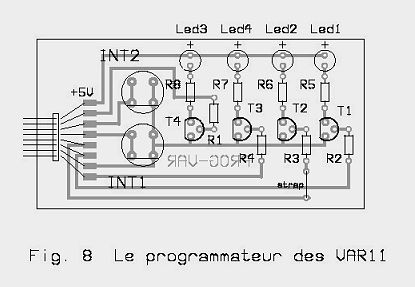 NB. Le fil inférieur du câble plat n'est utile qu'avec
VAR11-V3
NB. Le fil inférieur du câble plat n'est utile qu'avec
VAR11-V3
Emetteur sous tension :
Mettre le manche sur MINAB. Appuyer sur INT1.
LED1 s'allume. Un coup sur INT2
Mettre le manche sur MIN. Appuyer sur INT1.
LED1 s'éteint. LED2 s'allume. Un coup sur INT2
Mettre le manche sur MAX. Appuyer sur INT1.
LED1 et LED2 s'allument. Un coup sur INT2.
Tout s'éteint ... si ça a marché et si MIN < MAX
!
NB. Le dernier appui sur INT2 enregistre la tension batterie
du moment.
Noter que LED1 et LED2 comptent les enregistrements en binaire : 00 (0) au
départ, O1 (1), puis 10 (2), enfin 11 (3).
A la fin de la programmation, le variateur est inactif.
Pour le réactiver, avec les nouveaux paramètres, mettre l'EMETTEUR
sur ARRET quelques secondes, puis le remettre en marche.
6. ESSAIS.
Enlever le module de programmation. Ramener le manche concerné de
l'émetteur sur MINAB et l'y laisser 2 à 3 s. Pousser maintenant
vers MAX et constater l'allumage progressif de l'ampoule.
Couper tout. Monter le moteur et tester !
TABLEAU 1 : T5 --> MOSFET Canal N, disponibles à l'unité
| Référence | Vmax | Imax | RDSon | Prix HT |
| MTP60N06HD | 60 | 60 | 14 mW | 41.20 |
| MTP75N06HD | 60 | 75 | 10 mW | 69.50 |
| MTP75N05HD | 50 | 75 | 9 mW | 69.50 |
| BUK455-60A | 60 | 41 | 38 mW | 17.15 |
| BUK556-60A | 60 | 50 | 26 mW | 29.50 |
| BUK556-60H | 60 | 60 | 22 mW | 28.33 |
| IRFZ44 | 60 | 50 | 28 mW | 47.60 |
TABLEAU 2 : T6 --> MOSFET Canal P, disponibles à l'unité
Référence |
Vmax |
Imax |
RDSon |
Prix HT |
MTP12P10 |
100 | 12 | 0.3 W | 25.50 |
IRF9Z34 |
60 | 18 | 0.14 W | 39.00 |
NB. Les prix sont donnés à titre indicatif et sans garantie
!
Le transistor T6 ne doit pas avoir une Rdson trop faible, car dans ce cas
l'énergie cinétique du moteur développe au
freinage une trop forte intensité qui risque de le griller ! Il est
conseillé d'utiliser la fonction "SLOW" disponible sur certains
émetteurs pour le passage au ralenti et à l'arrêt.